Chorégraphie interactive
Michel BRET, professeur émérite, A.T.I., Université PARIS8
Ateliers Réseaux Arts Numériques,LIMSI-CNRS, février 2008
Mots clés:
Art, conscience, émotion, interactivité, sentiment, vie artificielle.
1 Résumé
Les êtres vivants sont le siège d’émotion, véritables
régulateurs homéostatiques de l’interaction avec leur environnement. Les
sentiments, ou connaissance intérieure qu’ils ont de leurs émotions, peuvent
avoir un impact sur leur comportement selon leur niveau de conscience.
Des organismes naturels ou artificiels très
élémentaires (comme les insectes ou certains robots) peuvent avoir des émotions
mais probablement pas de sentiments. Des organismes plus évolués (comme les
humains ou, dans un avenir proche, certains systèmes artificiels) peuvent
ressentir un état de sentiment et en avoir une représentation consciente.
Damasio montre, avec son hypothèse du
marqueur somatique, que l’émotion fait partie intégrante des procédures de
raisonnement et de prise de décision , au même titre que l’intelligence et la
conscience, elle vise à la survie de l’organisme et s’enracine dans la
représentation du corps.
J’étudierai un système artificiel en interaction avec
le monde physique, et capable d’éprouver des émotions. Il ne s’agit donc pas de
copier ou de cloner le réel, mais bien de construire les conditions de
l’émergence d’une conduite émotionnelle. En m’inspirant de la biologie des
êtres vivant, des techniques connexionnistes (comme les réseaux neuronaux) et
en utilisant les données obtenuse par la capturd ed signals physiologiques du
LIMSI, je propose une nouvelle forme de chorégraphie interactive faisant
référence à l’autonomie (comme critère de conduites émotionnelles et intelligentes
aussi bien des êtres artificiels que naturels).
Pour être
le siège d’émotions, des systèmes artificiels devront intégrer au moins la
notion de proto soi, pour éprouver des sentiments ils devront en avoir une
représentation, l’intelligence supposerait, quant à elle, une conscience
étendue.
Introduction
Les émotions sont la manifestation visible de
réactions innées d’un organisme en interaction avec son environnement, elles
ont été retenues par l’évolution car elles contribuent, en tant que contrôle homéostatique,
à la survie de l’organisme. Les sentiments,
représentations intérieures des
émotions, sont inconscients et hors langage. C’est avec la représentation de
l’interaction et des modifications subies par l’organisme qu’émerge un
sentiment de connaître, début d’une conscience.
L’étude des émotions artificielles
suppose d’abord la notion d’interaction (entre un être artificielle et un
environnement réel ou simulé), et ensuite la possibilité de la représenter de
façon interne. J’ai choisi les réseaux neuronaux, d’abord pour leur puissance
de traitement de flux d’informations floues et non verbales, ensuite pour leur
structure de circuits massivement connectés réentrants et, enfin, pour leur
qualité de mémoire associative. Je mettrai en scène des danseurs de synthèse
manifestant, par leur attitude corporelle et leurs expressions, des émotions
artificielles suscitées par la musique
et/ou une interactivité gestuelle.
1 Emotions, sentiments et conscience
Le terme émotion, du latin « motio »,
signifie mouvement et trouble. Les
émotions sont des régulateurs tendant à maintenir en vie l’organisme qui les
manifeste, ce sont des réponses innées, apparaissant sans délibération consciente, formant une configuration neuronale
(cartographies du premier ordre) et utilisant le corps comme théâtre. Elles
font partie des dispositifs biorégulateurs de survie (régulations
homéostasiques construites sur l’opposition avantage-désavantage personnel,
récompense-punition). Leur fonction biologique est une réaction spécifique
(courir ou se figer devant le danger) et aussi une préparation à cette réaction
(augmenter le flux sanguin dans les muscles pour la fuite). Les réponses
constituant des émotions peuvent être par exemple l’activation des muscles
du visage modifiant l’expression, la peau qui pâlit ou qui rougit, des postures corporelles signifiant la joie,
la colère, la peur, la surprise.
On distingue les émotions primaires (bonheur,
tristesse, peur, colère, surprise et dégoût), les émotions secondaires ou
sociales (embarras, jalousie, culpabilité, orgueil) et les émotions
d’arrière-plan (bien-être, malaise, calme, tension).
Les organismes équipés pour sentir les émotions ont
des sentiments. Alors que les émotions sont des manifestations publiques,
dirigées vers l’extérieur, les sentiments ne sont éprouvés que par l’être qui
en est le siège, ils sont privés et dirigés vers l’intérieur. Un état de
sentiment, représenté de façon non consciente (cartographies du second ordre),
est l’expérience mentale et privée d’une émotion.
Les organismes équipés d’une conscience sont capables
de savoir qu’ils ont des sentiments et peuvent répondre de façon adaptée en
modifiant leur comportement. La conscience, comme l’émotion, vise à la survie
de l’organisme et s’enracine dans la représentation du corps. La conscience
peut se voir comme le fonctionnement du triplet
organisme-environnement-interaction, c’est la connaissance construite d’une
part sur la relation de l’organisme à son environnement et, d’autre part, sur
les changements provoqués dans l’organisme, sous forme de configurations
neuronales.
Damasio a montré, avec son hypothèse du marqueur
somatique [1], que des individus, entièrement rationnels jusqu’à ce que
survienne une lésion neurologique dans des régions cérébrales contrôlant
l’émotion, perdent alors, non seulement l’émotion, mais encore leur capacité à
prendre des décisions rationnelles. Ainsi l’émotion fait partie intégrante des
procédures de raisonnement et de prise de décision. Le raisonnement est
affecté, de façon non consciente ou consciente, par des signaux provenant des
réseaux neuronaux régissant l’émotion. L’émotion aide le raisonnement et son
contrôle sélectif, autant que son excès, perturbe la rationalité.
Nous retiendrons plusieurs niveaux d’évolution d’un
organisme:
Le proto soi, basique, siège d´émotions donnant lieu
à des représentations neuronales du premier ordre (sous forme de cartographies)
de la perception non consciente qu’il a de lui-même et de son environnement.
La conscience noyau , donnant lieu à des
cartographies du second ordre, véritables re-représentations des modifications
subies par le proto soi lors de l’interaction de l’organisme avec son
environnement. Elle ne nécessite qu’une mémoire a cours terme de faible
capacité et ne suppose ni le langage ni des processus d’apprentissage.
Les apprentissages inscrivent leur histoire dans une
mémoire autobiographique. L’évocation de souvenirs réveille des images mentales
(configurations neuronales) pouvant être perçues, au même titre que des objets
réels, et donner lieu à des émotions, générant des sentiments, eux-même pouvant
modifier la mémoire autobiographique.
La conscience étendue traite les souvenirs comme des
objets, elle suppose l’apprentissage stocké dans la mémoire autobiographique et
le rappel simultané de nombreuses images mentales. Elle est la condition de
l’intelligence qui manipule abstraitement des connaissances afin de pouvoir
élaborer de nouvelles réponses, grâce, en particulier, au langage.
La synthèse d’émotions artificielles ne suppose finalement
que l’existence d’un proto soi artificiel, ce que les réseaux neuronaux
permettent assez facilement de construire. Par contre, si on veut lier
l’émotion à des comportements intelligents, il faudra définir différents
niveaux de conscience, depuis la conscience noyau permettant les sentiments
jusqu’à la conscience étendu, condition de l’intelligence, et il s’agit là
d’une tâche autrement difficile.
2 La seconde interactivité
Avec Edmond Couchot et Marie-Hélène Tramus nous
distinguons plusieurs types d’interactivité:
La « première interactivité », ou
interactivité de commande, qui est celle de la simple boucle rétroactive de la
cybernétique à la base de la plupart des systèmes interactifs se limitant au
contrôle homéostatique, ce qui correspond au proto soi.
Puis la « seconde interactivité » (par
analogie avec la seconde cybernétique), ou « interactivité
intelligente », qui apparaît dès lors que le système qui la produit est
capable de se modifier lui-même au cours d’un apprentissage par lequel il
interagit avec son environnement afin de s’y adapter, ce qui correspond à la
conscience noyau.
On pourrait même parler d’une « troisième
interactivité » qui intégrerait la notion de mémoire autobiographique dont
l’activation pourrait faire surgir des souvenirs pouvant jouer le rôle
d’objets. L’être artificiel serait ainsi amené à penser et à rêver. La porte
est ouverte pour une étude du fonctionnement, et des dysfonctionnement
possibles, de la pensée artificielle.
3 Expérimentations
3-1 Chorégraphie interactive
A la suite de Karl Sims [3], Van de Panne et Fiume
[4], j’ai construit des systèmes interactifs [5] évolutifs capables d’éprouver
des émotions et de manifester des comportements intelligents proches du vivant,
l’un d’eux a été utilisé dans l’installation interactive « La Funambule
Virtuelle » [6] que j’avais réalisé en 2000 avec Marie-Hélène Tramus.
Je me propose aujourd’hui d’appliquer ces idées à la
danse en confrontant plusieurs systèmes : Un ballet de danseurs réels, un
autre de danseurs virtuels, tout deux en interaction entre eux et avec un
environnement scénique, musical et public.
1) Le ballet de danseurs réels
Leurs émotions seront captées et transmises au
système artificiel. Ils verront, en retour, les émotions manifestées par les
danseurs artificiels.
2) Le ballet de danseurs artificiels
Leurs réseaux neuronaux reçoivent, en entrée, les
émotions captées sur les danseurs réels, ils produisent en sortie une
gestuelle, manifestation d’une émotion artificielle.
3) L’environnement scénique
Les danseurs réels interagissent entre eux, suivent
une musique, sont sensibles aux réactions du publique, il en est de même des
danseurs artificiels. On peut aussi envisager que la musique soit générée
dynamiquement en interaction avec les deux ballets. L’ensemble forme un système
complexe, autonome, évolutif et interactif.
3-2 Danseurs artificiels
Il s’agit d’organismes artificiels comportant:
3-2-1 Un corps
Sous la forme de modèles dynamiques inspirés de la
biomécanique des êtres vivants, plongé dans un environnement à la fois
artificiel (simulation de contraintes) et réel (interactivité) (figures 1 à 3).



Fig 1,2 et 3 : Squelette, muscles et peau
3-2-2 Un "cerveau"
Sous la forme de réseaux neuronaux [7] dont les
entrées sont connectées aux sorties des capteurs virtuels (centrale
inertielle située dans la tête, sensations kinesthésiques, détecteurs de
contact) le renseignant sur l’état physique du corps, ainsi qu’aux sorties de
capteurs réels (micros, webcam, capteurs de mouvement et de pression, capteurs
biométriques…) le renseignant sur l’état de l’environnement interactif.
La figure 4 montre un signal biométrique mappé sur la couche d’entrée (en rouge) du
réseau dont l’activité est passée à la couche cachée (en rose), puis à la
couche de sortie constituée de neurones moteurs (en blanc) dont l’activité agit
sur le système musculaire provoquant les mouvements de l’acteur virtuel.
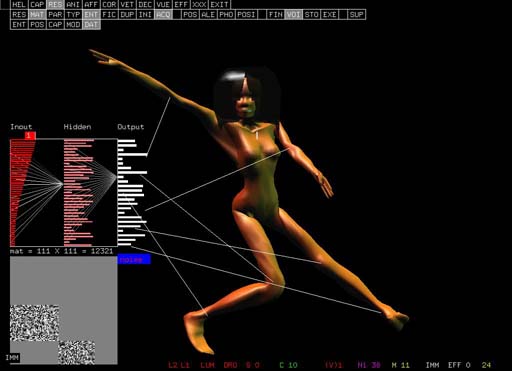
Fig 4: Activation des muscles par un réseau neuronal
3-2-3 De procédures d’apprentissages supervisés
Lui permettant, au cours de l’interaction, de se
construire une mémoire autobiographique de comportements.
Dans cet exemple un signal sinusoïdal a été généré
pour des raisons purement didactiques.
La figure 5 montre l’acquisition d’un couple
d’apprentissage, l’entrée est une fenêtre encadrant une portion basse du signal
et la sortie qui lui est associée est une position accroupie du corps.
La figure 6 montre l’acquisition d’un autre couple
d’apprentissage, l’entrée est une fenêtre encadrant une portion haute du signal
et la sortie qui lui est associée est une position en extension du corps.
Sur les figures 7 et 8 on peut voir la progression de
l’algorithme d’apprentissage (par rétropropagation de l’erreur), l’ erreur
(courbe jaune) est de 30% après 9 essais et tombe à 0.03807 après 54 essais.
La figure 9 montre le réseau délivrant une position
proche de la sortie de l’apprentissages 6 pour une fenêtre proche de l’entrée
de cet apprentissage.
Enfin la figure 10 montre le réseau en action
(lorsque la fenêtre d’entrée parcourt le fichier de données) en proposant des
positions du corps cohérentes bien que non apprises (propriété de
généralisation des réseaux neuronaux).
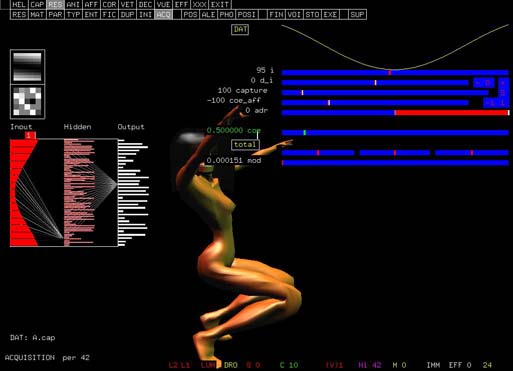
Fig 5: Acquisition d’un couple d’apprentissage (position basse)
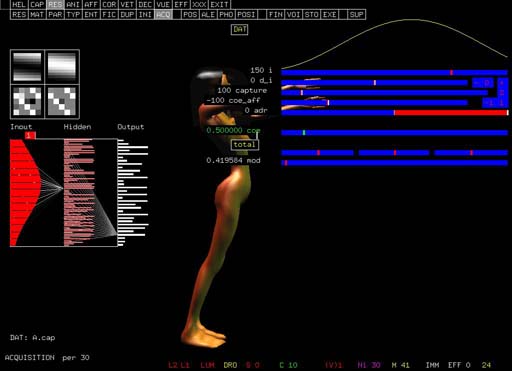
Fig 6: Acquisition d’un couple d’apprentissage (position haute)

Fig 7: Erreur de 30% après 9 essais
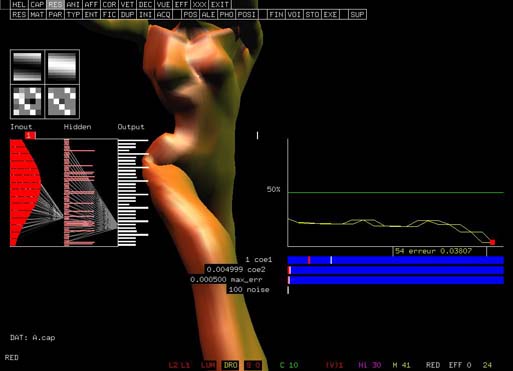
Fig 8: Erreur de 0.03807 après 54 essais
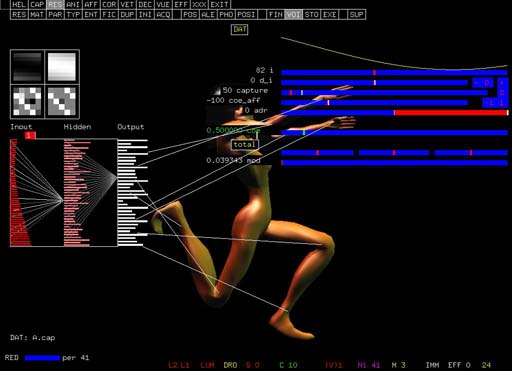
Fig 9: Interprétation d´une entrée non apprise
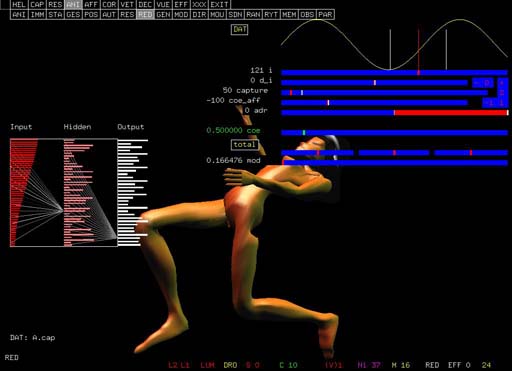
Fig 10: Réseau neuronal en action
3-2-4 De procédures d’apprentissages non supervisés
D’autres apprentissages que supervisés peuvent être
envisagés, j’ai développé ailleurs une méthode basée sur la cohérence de flux
donnant une complète autonomie au système qui détecte tout seul les régularités
de son environnement et s’autoconfigure en conséquence [8]. La figure 11
montre:
En haut (en vert), le flux d´entrée de la webcam dans
la mémoire de travail (25 images soit une seconde).
En dessous (en rouge), le flux de sortie, d´abord
arbitraire, puis qui se cale sur le flux d´entrée à mesure que les poids
synaptiques sont corrigés.
Encore en dessous le réseau complètement connecté
avec sa couche d’entrée (en bleu) projection de la rétine artificielle, sa
couche de sortie (en rouge) connectée au système musculaire, et sa matrice des
poids synaptiques (ici complètement occupée).
On peut voir à droite la courbe d’erreur (en jaune)
mesurant la cohérence des deux flux.
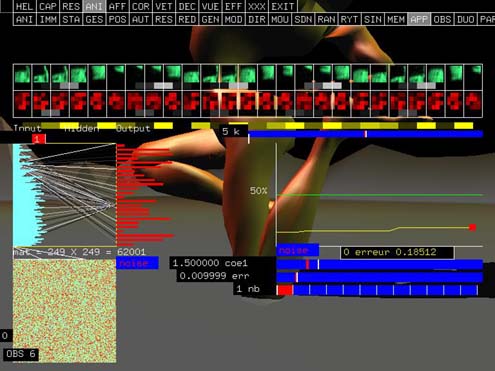
Fig 11: Apprentissage non supervisé par la méthode de cohérence de flux.
Le système fonctionne de façon autonome, en l’absence
de sollicitations extérieures, par l’évocation de souvenirs (lorsqu’ils sont
connectés aux entrées des réseaux), et de façon interactive lorsqu’il est mis
en présence d’environnements variables. Ses prises de décision, c’est à dire
ses comportements intelligents, évoluent au grès des expériences qu’il mène
avec des partenaires vivants ou artificiels. De tels systèmes peuvent trouver
des applications dans le domaine de la chorégraphie, du théâtre, du cirque et
dans tous les arts accordant une certaine importance au corps. Le spectacle
émerge de la confrontation d’acteurs vivants avec des acteurs artificiels, il
ne sera donc pas écrit mais résultera des interaction multiples ayant lieu au
cœur de ce système dynamique non linéaire.
3-3 Expérimentations
J’ai utilisé la vidéo des danseuses réelles dont la
performance a donnée lieu aux captures de données biométriques réalisées au
LIMSI en janvier 2008 pour construire un ensemble de couples d’apprentissages
constitué:
1) De fenêtres dans le fichier de capture encadrant des formes
remarquables du signal.
2) De positions du corps inspirées de la vidéo.
La figure 12 montre le signal biométrique (jaune en
haut de l’écran), le réseau (à gauche) et la danse virtuelle exécutée qui en
résulte.

Fig 12: Danse virtuelle à partir d´un signal biométrique.
Avec plusieurs danseuses virtuelles mues par la
méthode expliquée ci dessus et en interaction les unes avec les autres, on
dispose de l’amorce d’une chorégraphie interactive utilisant la capture
d’émotion (voir figures 13 à 17).
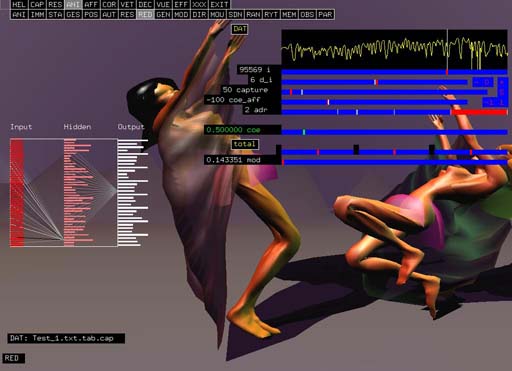


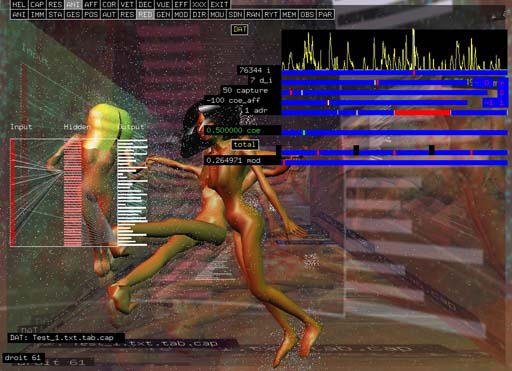
Fig 13 à 17: Plusieures danseuses.
Conclusion
Je pense avoir montré que
la synthèse d’émotions artificielles ne saurait se limiter à la simple
simulation d’émotions naturelles et qu’elle nécessite la construction
d’organismes artificiels capables de représenter, de façon non verbale (donc
par d’autres moyens que la programmation classique), la perception qu’ils ont
de leur environnement et de l’action qu’ils exercent en retour sur lui. Les
comportements rationnels et intelligents, les prises de décisions, qui
dépendent des émotions, devront nécessairement s’appuyer sur cette base
émotionnelle.
Bibliographie
[1] Antonio R.Damasio, Le sentiment même de soi, corps,
émotions, conscience, Ed Odile Jacob, 1999.
[2] Edmond Couchot, Marie-Hélène Tramus, Michel Bret A
segunda interatividade. Em direção a novas praticas artisticas 2003 :
In Arte vida no século XXI p.27, 38, Diana Domingues,Editora UNESP Saõ Paulo,
Brasil.
[3] Karl Sims, Evolving Virtual Creatures, in Computer Graphics, 15-22, 1994.
Michiel Van de Panne, Eugène Fiume, Sensor-Actuator
Networks, in Computer Graphics, 335-342, 1993.
[5] Michel Bret, Virtual Living Beings, in Lecture Notes in Artificial
Intelligence, Virtula Worlds 119-134, Ed. Jean-Claude Heudin, Springer 2000.
[6]
Michel Bret, Marie-Hélène Tramus, Alain Berthoz Interacting with an
Intelligent Dancing Figure : Artistic Experiments at the Crossroads
betweenAart and Cognitive Science, in Leonardo, Vol 38, N° 1, pp. 46-53,
2005.
7] Hervé Abdi: Les
réseaux de neurones, Presses Universitaires de Grenoble 1994.
[8] Michel Bret, Création, émergence, autonomie, in
Rencontres sur la Réalité virtuelle et les Arts Numériques, Centre des
Art d’Enghien, Université Paris8, mars 2007 .