=>
Résumé
Introduction
Le corps
Le mouvement
L´interactivité
Conclusion
Bibliographie
=>
Résumé
animer ? ==> faire vivrepersonnage ? ==> être artificiel
vie artificielle
connexionnisme (réseaux neuronaux)
évolitionnisme (algorithmes génétiques)
populations dêtres artificiels (intelligents, sensibles et autonomes)
interaction
Une vie artificielle est-elle possible à côté de la vie naturelle ?
Des êtres artificiels peuvent-ils créer, rêver ?
Quelle est la place de la narration dans ce nouveau contexte ?
=>
Introduction
animation de personnages
animation traditionnelle: observation de mouvements réels ->animation 2D, constuire un langage.Automatisation informatique
Généralisation, simplification, accessiblilité
animation traditionnelle -> nouvelles techniques (recréation d´un autre langage.Le 3D
Image symbolique 2D -> réalismetechnicisation
Uniformisation (modes et contraintes de la production)
Évolution du matériel
Le temps réel
Nouvelles formes de créations artistiques
.=>
Est-ce une révolution ?
Ce qui existe actuellement
N´est pas le fait des artistes eux mêmes.Pas aussi révolutionnaire qu´elle aurait pu l´être
Turing (intelligence)
Neumann (auto reproduction)
La guerre puis l´économie de marchée -> calculateurs # penseurs
Neurone artificiel
(1943) McCulloch et PittsRumelhard (1975): les réseaux neuronaux comme un des outils les plus puissants de l´intelligence artificielle.
La cybernétique
Processus de communication et de contrôle chez l´animal et dans les machines.Dépasser la notion de contrôle -> autonomie (automatisme -> vivant).
Les neurosciences:
Varela
Damasio
Une véritable révolution (scientifique et artistique, est en cours ([Couchot 2012]).
=>
Le corps
Corps et esprit
Modélisation du corps
Le problème de l´emergence
=>
Corps et esprit
Le dualisme cartésien du corps et de l´esprit
Aujourd´hui dépassé:Edelman
Comment la matière devient conscience) (l´esprit est une émergence du fonctionnement connexionniste du cerveau).
Hypothèse du noyau dynamique (importance de la réentrance dans l´explication du comportement unifié du cerveau).
Le dualisme de la raison et de l´émotion
Damasio: Hypothèse des marqueurs somatiques (Lerreur de Descartes)Les mécanismes du raisonnement sont affectés par des signaux provenant des réseaux neuronaux régissant l´émotion.
L´émotion aide la raison et lui est indispensable.
L´émotion, comme régulateur homéostatique, est une incarnation de la logique de survie.
Voir emotion.fonc
Pourquoi l´informatique (incarnant la logique et le raisonnement) a-t-elle fait l´impasse sur l´émotionnel ?
Les ordinateurs ne seront vraiment rationnels que lorsqu´ils pourront éprouver des émotions.
Avatar, personnage, être artificiel
Un avatar renvoie, dans la mythologie indienne, à la descente (ou réincarnation) d´un dieu, il est, dans nos sociétés, la représentation d´un utilisateur sur Internet ou dans un jeu vidéo.Un personnage est créé par un auteur dont il dépend entièrement.
Un être artificiel sera intelligent et autonome (c´est à dire non contrôlé), pensant, pouvaant éprouver des émotions, et même possédant une conscience.
Ce sera le dernier dualisme à résoudre: contrôle/autonomie.
=>
Modélisation du corps
Le squelette
Le système musculaire
La peau
Le cerveau
=>
Les 3 premiers niveaux: squelette, système musculaire et peau.
=>
1) Le squelette
C´est une structure articulée, supposée rigide, d´os dont les positions relatives sont mesurées par des quaternions en respectant certaines contraintes biomécaniques.Voir demo1_quat.fonc
=>
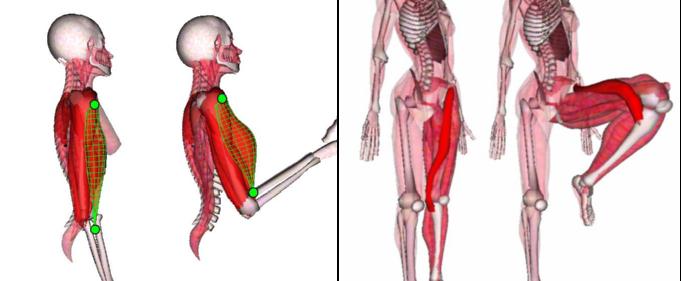
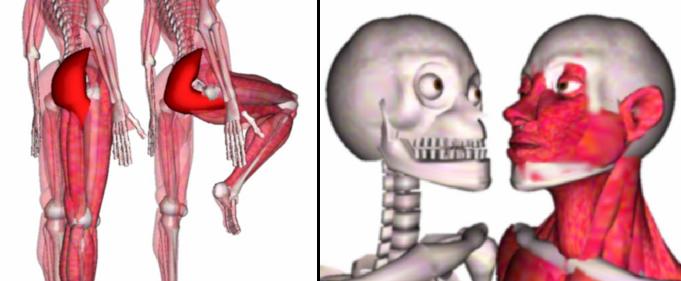
2) Le système musculaire
C´est une structure de muscles dynamiques (modélisés par des ressorts ancrés aux os et en assurant la mobilité. Ils changent de longueur (et donc font pivoter les os auxquels ils sont accrochés) sous l´impulsion d´un signal nerveux émanant de la couche de sortie d´un réseau neuronal.Notre projet n´est pas de créer physiquement un être artificiel (ce qui serait une approche robotique), mais plus simplement de produire des êtres virtuels, sortes d´autres nous-mêmes, avec lesquels nous pourrions interagir. C´est pourquoi, dans un souci de simplification nous incluerons dans ce système musculaire les organes (tels que le cœur, les poumons, l´estomac, etc..) modélisés, non pas pour leur fonctionnement organique, mais pour leur seule contribution à crédibiliser l´aspect extérieur du corps.
=>
3) La peau
C´est une surface souple enveloppant les éléments précédents. Seule visible, son aspect dépend entièrement de la disposition des os, des muscles, des organes et de leures formes. Les sculpteurs, comme Rodin, ont bien compris l´importance de l´anatomie et des lois de la biomécanique dans le rendu de l´aspect extérieur du corps. La technique du laser virtuel permet de construire une telle enveloppe en scannant les éléments précédemment décrits (os, muscles et organes).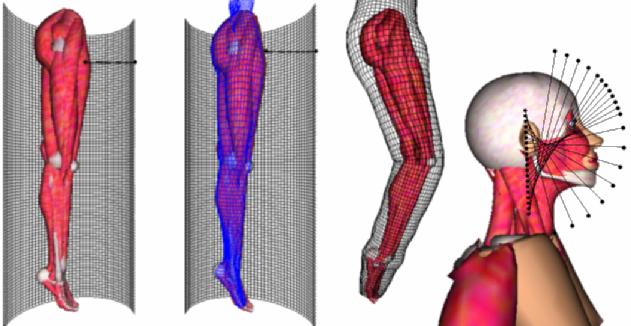
Bien entendu,en animation, ce procédé doit être invoqué à chaque image puisque ces éléments changent de forme et de position. Nous pointons là une exigence qui contredit la fameuse trilogie modélisation-animation-rendu: en fait tout se tient et le corps artificiel n´a pas d´existence en dehors de sa mobilité et c´est pourquoi sa "modélisation" devra contenir une dynamique (sous forme de méthodes dans un langage objet).
=>
4) Le cerveau
Système nerveuxRéseaux neuronaux
Apprentissage
=>
Système nerveuxLes organismes vivants ont développé, au cours de leur évolution, une membrane délimitant une frontière entre un intérieur (sorte de moi) et un extérieur (l´environnement). Certaines cellules de cette membrane sont devenues sensibles et ont formé des organes sensoriels (capteurs), d´autres sont devenues actives et ont formé des muscles (actuateurs), entre les deux une communication s´est établie et complexifiée en circulant dans des cellules nerveuses formant des réseaux: c´est le système nerveux. Nous le modéliseront au moyen de réseaux neuronaux.
=>
Réseaux neuronauxLes difficultés considérables rencontrées dans la modélisation et l´animation du corps humain par les méthodes traditionnelles nous ont conduit a adopter une stratégie radicalement différente: Abandonnant une démarche purement algorithme nous avons confié la résolution de ces problèmes à des réseaux capables de s´auto-organiser et faisant preuve d´une conduite "intelligente" émergeant de leurs nombreuses connexions. Au lieu de chercher une solution algorithmique à un problème, on construit un réseau neuronal que l´on met en présence de ce problème sur le mode "question-reponse" ou encore "essai-erreur" en le faisant s´autoconfigurer de façon à répondre de mieux en mieux à des exemples. La propriété dite de généralisation d´un réseau neuronal garantit que celui-ci peut réagir convenablement à des exemples non appris.
Nous modéliserons donc le "cerveau" par des réseaux neuronaux qui assureront un comportement autonome intelligent et sensible du personnage.
Les entrées de ces réseaux sont connectées à des capteurs "regardant" l´environnement, et les sorties sont connectées au système musculaire auquel elles envoient des impulsions. Les mouvements du personnage sont donc engendrés par une décision neuronale induite par l´interaction du corps avec son environnement et dépendant de la "connaissance" qu´il en a. Cette connaissance ne peut s´acquérir que par un apprentissage (supervisé ou non) au cours duquel les réseaux s´auto-configurent de façon à maintenir l´équilibre homéostasique de l´organisme visant à favoriser sa survie.
Voir demo1_network.func
=>
apprentissageApprentissage supervisé
Apprentissage non supervisé
Implémentation
=>
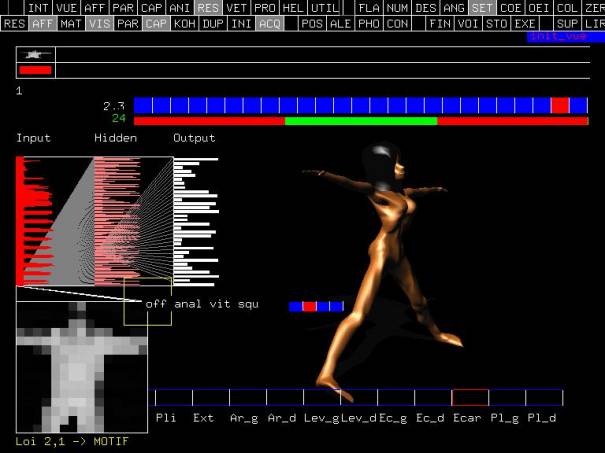
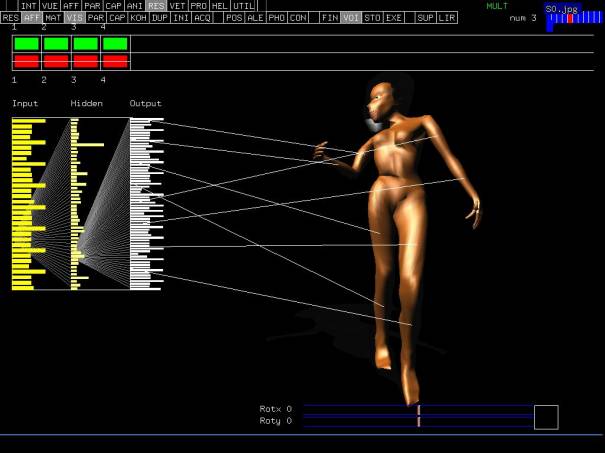
Apprentissage superviséL´algorithme de la rétropropagation de l´erreur permet à la matrice des poids synaptiques d´un perceptron de s´auto-configurer à partir de couples d´apprentissage présentés comme exemples à vérifier. A l´issue de cet apprentissage le réseau sera capable de sortir le 2ème élément de chaque couple quand son entrée reçoit le 1er élément. Il sera capable, aussi, de réagir convenablement pour des couples non appris.
Sasie d´un couple d´apprentissage avec une caméra.
=>
Le réseau en action.
=>
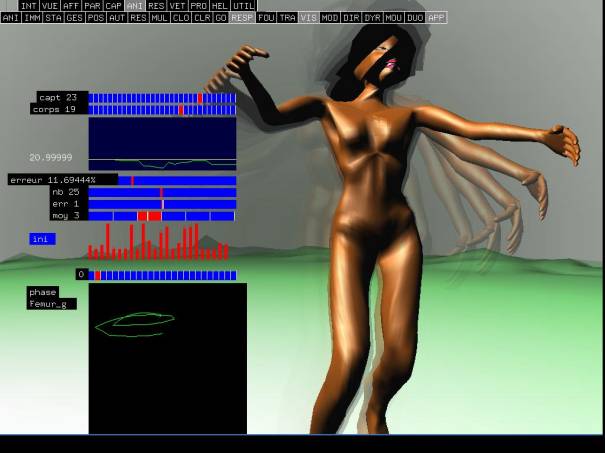
Apprentissage non superviséLes ;réseaux de Kohonen proposent une méthode d´apprentissage non supervisé consistant à détecter des régularités dans des configurations présentées en entrées et à les classifier. Il s´agit d´un apprentissage compétitif dans lequel aucun professeur n´est nécessaire, le réseau devant découvrir tout seul des régularités dans les entrées.
J´ai proposé la méthode dite de cohérence de flux qui cherche à rendre cohérents les flux d´entrée et de sortie (ce qui est une forme de résonnance), particulièrement efficace lorsque le réseau s´auto-configure, de façon permanente, tout en interactant (ce qui est le cas des organismes vivants et aussi celui d´un acteur artificiel participant à un spectacle).

Un exemple d´apprentissage non supervisé par la méthode de cohérence de flux.
=>
Un exemple d´animation au moyen de systèmes dynamiques non linéaires.
=>
ImplémentationLes réseaux sont traditionnellement utilisés dans les problèmes de reconnaissance, mais on peut aussi en faire des outils de sythèse, en voici quelques exemples:
Dans la Funambule virtuelle, que j´ai développé avec Marie-Hélène Tramus, l´équillibriste se maintient sur la corde en réagissant à sa propre position. Il suffit pour celà de l´avoir entraîné avec des couples du type:
(entrée = position de déséquilibre, sortie = geste de rééquilibrage)
Dans d´autres installations comme danse avec moi des réseaux spécialisés prennent en entrée un signal audio (musique) et donnent en sortie des forces appliquées aux muscles. Il suffit, pour celà, d´ entraîner ces réseaux avec des couples d´apprentissage du type:
(entrée = paramètres dynamique du signal, sortie = pas de danse)
et en les combinant avec des réseaux de rééquilibrage on obtient des danseurs. Il est alors intéressant de les faire interagir avec d´autres danseurs (du même type ou réels) pour créer des chorégraphies mêlant réel et virtuel.
=>
Le problème de l´emergence (d´où venons-nous, qui sommes-nous, où allons-nous ?)
Naissance de ces personnages, deux questions:1) Qui décide de leur constitution initiale ?
Le créateur (programmeur et/ou artiste) est maître absolu (confortant l´égo du dit maître, mais bloque toute évolution, toute autonomie, toute surprise, toute invention, aucune propriété "émergente" ne pourra jamais sortir d´un système qui a défini une fois pour toute ce qui est possible et ce qui ne l´est pas).
Les réseaux neuronaux constituant le cerveau artificiel sont le résultat d´une èvolution darwinienne: pratiquement nous définissons une population de tels réseaux entièrement aléatoires et donc certainement inefficaces. Puis nous les faisons se croiser (avec des possibilités de mutation) en ne retenant que ceux qui satisfont le mieux à une certaine fonction de "fitness" (par exemple savoir danser), ce qui suppose de les faire agir suffisamment longtemps pour qu´il soit possible d´évaluer leur compétence en ce domaine. La même méthode peut être employée pour définir les autres constutuants du corps (squelette, muscles, ...).
2) quid de leur devenir ?
Une narration, écrite à l´avance, décide du déroulement de l´histoire.
Mais une histoire, avant de s´écrire, arrive et se vit.
C´est toute la force des jeux en ligne qui proposent à une multitude d´utilisateurs de pouvoir s´inscrire dans une histoire qu´ils écrivent eux-mêmes.
animation => évolution:
définition d´une population de personnages
étude de leurs interactions entre eux et avec leur environnement dans lequel pourra se projeter d´éventuels interacteurs.
La robotique évolutionniste pose en terme de coévolution, et non plus seulement de compétition et de lutte, ce sujet chèr à la science fiction qui est celui des rapports futurs que pourront entretenir l´homme et les robots.
=>
Le mouvement
Au début était l´action
Les techniques de génération de mouvements
Intégration déléments de la physiologie de la perception et de laction
=>
Au début était l´action
Selon Alain Berthoz le mouvement est à l´origine des comportements les plus évolués des êtres vivants: ceci est vrai de la perception (regarder c´est aussi se mouvoir dans l´espace), de l´intelligence (comprendre une transformation géométrique c´est aussi l´effectuer mentalement). Apprendre la théorie des nombres et celles des ensembles à de jeunes enfants se fair très simplement par la manupilation d´objets (cubes que l´on regroupe par couleur).Le mouvement ne saurait se planifier à l´avance puisqu´il est la réponse de l´organisme aux sollicitations de son environnement et des autres organismes qui sont imprévisibles, sauf si ce mouvement se contente de jouer une pièce écrite antérieurement. Ce qui remet en cause la notion d´histoire, de scénario, au profit d´un récit ouvert.
=>
Les techniques de générations de mouvements
Les techniques traditionnelles
La dynamique
La cinématique inverse
Le comportemental
L´approche animat
Le connexionnisme
L´évolutionnisme
=>
Les techniques traditionnelles
De ce point de vue tous les systèmes traditionnels d´interpolation (comme le fameux key framing) sont disqualifiés, comme le sont aussi toutes les méthodes qui ne comporteraient pas de feedback correcteur permettant une adaptabilité interactive (cette question était d´ailleurs à l´origine de la pensée cybernétique lorsque Neumann inventait de nouvelles heuristiques pour guider un missile vers une cible mobile).=>
La dynamique
En affectant aux objets des propriétés physiques (comme la masse, la résistance à la déformation, la rugosité, ...), et en les plaçant dans des champs de forces, il est possible de déterminer, à chaque instant, leur position, leur vitesse, et les chocs éventuels avec des obstacles, au moyen des équations différentielles de la dynamique. Des méthodes de linéarisation permettent de traiter ce problème en temps réel. Des mouvements "crédibles" (naturels) sont ainsi produits, mais seulement pour des objets inanimés, et qu´en est-il pour les êtres vivants ? C´est la question de l´"intention" qui se pose (une pierre tombe sans le vouloir, alors qu´un animal court dans un but précis). Nous la résoudrons en donnant au cerveau artificiel une volonté qu´il découvrira, au cours d´un apprentissage intéractif, en privilégiant certaines situations qui lui font "plaisir" (en fait celles qui favorisent sa survie). Ces situations seront stockées dans des mémoires associatives jouant le rôle d´"attracteurs" lorsque l´être artificiel agira interactivement.=>
La cinématique inverse
Issue de la robotique, cette méthode génère automatiquement les mouvements particuloers de chaque composante d´une structre articulée lorsque l´on ne définit le mouvement que de l´un d´entre eux. Par exemple l´animateur définit le mouvement d´une main allant saisir un objet, et les mouvements du poignet, du bras, de l´avant bras, de tout le torse, etc.. seront générés en conséquence. De tels procédés sont précieux pour décharger l´organe de décision (le cerveau) des détails d´une exécution, les réseaux n´auront à s´occuper que du seul mouvement de la main.=>
Le comportemental
Des entités indépendantes et autonomes, interagissant entre elles et avec un environnement dans lequel elles sont plongées forment un système multu-agents (SMA). Initialement issus de l´observation du comportement de certains insects organisés en sociétés, les SMA trouvent des applications en intelligence artificielle pour résoudre les problèmes très complexes que sont par exemple la prévision du comportement d´un ensemble important d´éléments autonomes interagissant (vol d´oiseaux, banc de poissons, foules, ...) ou la planification des stratégies d´éléments organisateurs ou leaders travaillant ensemble dans un but commun (équipe de programmeurs, économie cognitive, ...).Voir le film Betezeparticules_1994
=>
L´approche animat
Un animat est un agent virtuel (simulé sur ordinateur) ou réel (robot) dont les comportements autonomes et adaptatifs sont inspirés de ceux des animaux. Il se compose:1) De capteurs recevant des informations de son environnement.
2) D´actuateurs agissant sur le monde extérieur.
Les capteurs et les actuateurs constituent une interface entre l´animat et le monde, correspondant à la notion de membrane.
3) D´une architecture de contrôle organisant les relations entre ces "entrées-sorties" qui peut être innée ou acquise par apprentissage (réalisation de certaines tâches, tout en cherchant à survivre). Au cours de générations successives d´une population d´animats certains caractères sont transmis et d´autres évacués (sélection artificielle au moyen d´ algorithmes génétiquesalgorithmesou de programmation génétiques).
=>
Le connexionnisme
Les entités du comportemental, comme les animats, sont des agents autonomes dont l´évolution dépend du flux d´information transitant dans le système depuis les capteurs jusqu´aux actuateurs.Les méthodes connexionnistes simulent le système nerveux des êtres vivants en munissant les êtres virtuels de réseaux de neurones interconnectés par des matrices de poids synptiques qui s´auto-configurent au cours d´apprentissages supervisés ou non. Voir par exemple une expérimentation dans les arts du connexionnisme.
Voir les films Cahincaha_1996 et
Suzanne_1999
=>
L´évolutionnisme
Une population d´êtres autonomes peut évoluer, par croisements et mutations, en optimisant une fonction de fitness, selon une sélection artificielle de type darwinien. Cette méthode permet de résoudre des problèmes trop complexes, ou mal définis, pour être traités par les méthodes analytiques classiques, ce qui est le cas de la plupart des questions que peut se poser un artiste.Voir mouv_gen: prototype en langage anyflo du projet porté par Marie-Hélène et Judith.
=>
Intégration déléments de la physiologie de la perception et de laction
Corrélations automatiques
Référentiel d´interaction
Nous inspirant des stratégies du cerveau qui, pour contrôler des mouvements complexes, diminue le nombre de degrés d´action qu´il a sur les muscles en créant des corrélations automatiques entre certains paramètres, nous intégrerons quelques principes et lois naturelles du mouvement afin de moduler certains comportements autonomes. Ces règles ont été intuitivement comprises par les sculpteurs (et les acteurs de théâtre oriental) qui ont su rendre les mouvements du corps et leurs relations avec les émotions. Ils nous enseignent que le mouvement sexprime dabord par la posture et aussi que la cinématique du mouvement est porteuse de sens: que la trajectoire dun doigt, le déplacement de la tête, le balancement du corps doivent répondre à des lois qui sont au carrefour de la mécanique et de la neurologie. Ils nous enseignent encore quun mouvement naturel est source de plaisir [Berthoz].=>
Corrélations automatiques
La loi de la puissance un tiersLopposition de phase
Le plan de phase
=>
La loi de la puissance un tiers
Un autre exemple issu de lobservation de la cinématique des mouvements naturels qui révèle les "calculs" effectués par le cerveau pour contrôler le mouvement, suivent une loi, dite de la puissance un tiers, qui relie la cinématique du geste et la géométrie. Ainsi si vous dessinez une ellipse sur une feuille de papier dun mouvement naturel , on peut montrer une relation entre la courbure et la vitesse tangentielle des mouvements de la main . Cest une loi du mouvement naturel. Si on ne respecte pas cette loi, le mouvement apparaît artificiel. Ce qui est remarquable, cest quelle contraint aussi la perception du mouvement, les lois de production du mouvement naturel influencent les lois de la perception du mouvement Lorsque deux partenaires doivent accorder leurs deux corps en mouvement, ils doivent tenir compte de ces lois qui sont liés à des mécanismes internes du cerveau. Cette relation extraordinairement précise entre la courbure de la forme que vous dessinez et la vitesse tangentielle le long de sa courbe est la suivante :
V/(R1/3) = constante, avec V = vitesse tangentielle et R = Rayon de courbure.
Autre forme:
A = constant * R2/3, avec A = vitesse angulaire.
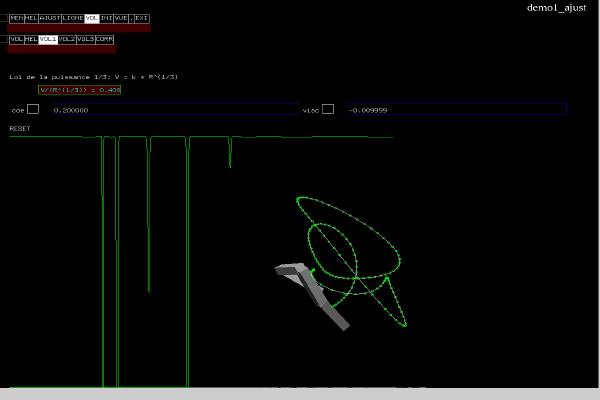
Sans correction
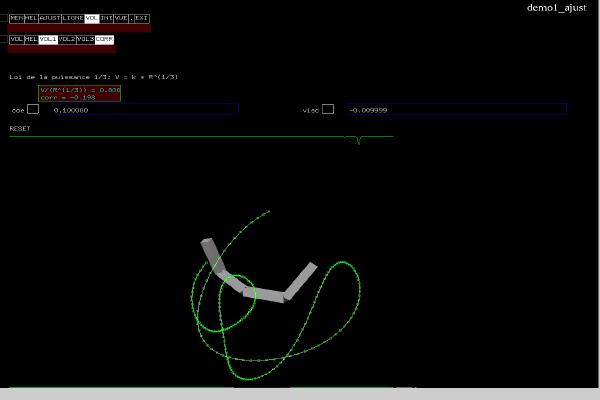
Avec correction
=>
Lopposition de phase
Des mouvements secondaires peuvent être engendrés par des variations inverses. Par exemple, l´angle que fait le bras avec le corps d´une part, et l´angle que fait l´avant bras avec le bras d´autre part, varient en sens inverse. « Si vous dessinez un 8 dans lespace, les angles entre les différents segments du bras vous paraîtront sans doute très variables. Il nen est rien : ils ont des relations très précises entre eux. Lorsque langle du bras par rapport au corps augmente, celui du bras par rapport à lavant bras diminue dune quantité égale. On dit quils sont en opposition de phase. Cette contrainte cinématique permet de contrôler le mouvement avec un seul paramètre, en ne faisant varier que le rapport damplitude des deux angles, ce qui simplifie considérablement le contrôle.
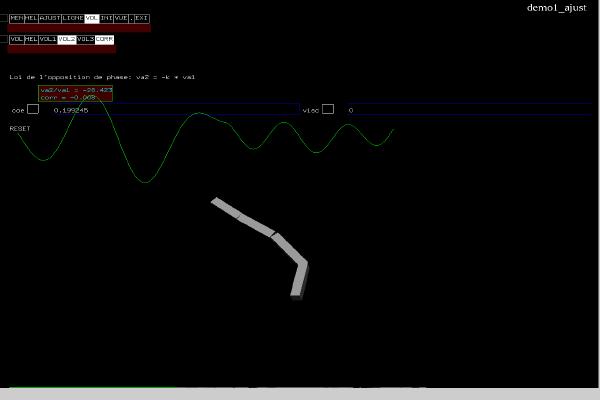
Sans correction

Avec correction
=>
Le plan de phase
Lorsque nous bougeons une jambe, les trois angles que font respectivement la cheville avec la jambe, la jambe avec la cuisse et la cuisse avec le tronc sont en dépendance linéaire. Dans un espace 3D représentant les variations de ces angles, les points de cet espace, ayant pour coordonnées la valeur de ces angles, restent au voisinage dun plan, appelé le plan de phase.
On peut constater d´une part que, dans ce cas, les points correspondants restent assez proches d´un plan idéal, alors que, pour d´autres parties du corps, cette corrélation n´est pas nécessairement vérifiée et que, dautre part, elle nest pas vérifiée de façon continue mais sur des segments de mouvements.
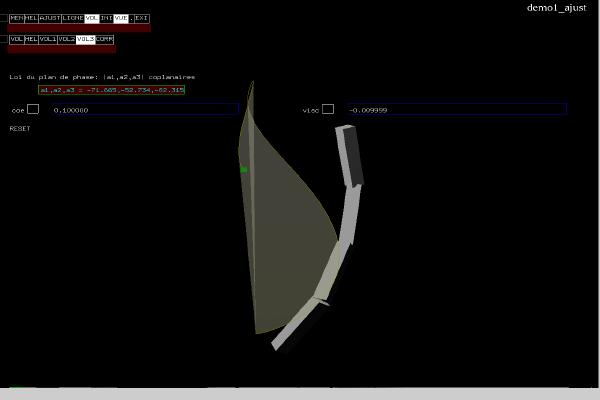
Sans correction

Avec correction
=>
Référentiel d´interaction
À côté de la gravité ou des référentiels géométriques comme les verticales, les horizontales, ou encore de laxe du corps, dautres systèmes de référence peuvent être utilisés par le cerveau. Ainsi on peut décrire les mouvements de deux danseurs dans qautre grands référentiels :1) par rapport à lenvironnement
2) par rapport au corps même du danseur
3) par rapport au partenaire
4) et, enfin, dans un référentiel dinteraction entre les deux danseurs dans lequel les deux précédents référentiels sont liés par certaines contraintes (par exemple le regard de chaque danseur peut être fixé sur le regard de lautre).
=>
L´interactivité
Elle est au cœur du vivant, lequel ne peut se concevoir sans interdépendance avec un environnement et avec d´autres vivants. Nous distinguerons plusieurs types de systèmes:Les systèmes réactifs
Les systèmes rétroactifs
Les systèmes homéostatiques
Les systèmes adaptatifs
Les systèmes vivants
L´interactivité intelligente
Voir demo_interac.fon
=>
Les systèmes réactifs
Ils obéissent au principe de l´action-réaction: je fais tel geste et il se produit telle chose. C´est le cas des dispositifs mécaniques et même de la plupart des systèmes informatiques construits sur la notion de contrôle que nous opposerons à celle d´autonomie, et c´est, par conséquent, le cas de la plupart des installations dites interactives utilisant ce genre de système.Celà n´a rien à voir avec l´interactivité qui, comme son nom l´indique, suppose une inter-relation, c´est à dire une relation dans les deux sens.
=>
Les systèmes rétroactifs
Ils sont construits sur le principe de la boucle rétroactive, ou feedback, de la première cybernétique et popularisés par le régulateur de Watt. Les systèmes de contrôle et la robotique en font un large usage, les artistes et les jeux assez évolués l´utilisent aussi.=>
Les systèmes homéostatiques
Ils tentent de conserver un état d´équilibre en ajustant leur action en fonction de la réponse de l´environnement, ce qui suppose qu´ils soient capables de percevoir.=>
Les systèmes adaptatifs
Ils adaptent non seulement leur réponse mais encore leur seuil d´équilibre, ce qui suppose qu´ils soient capables de se modifier eux-mêmes, on retrouve là la notion d´autopoïèse telle que l´a définie Varela dans L´inscription corporelle de l´esprit.=>
Les systèmes vivants
Un pas supplémentaire est franchi avec les sysèsmes vivants. Ceux-ci font appel au connexionnisme et à son implémentation informatique sous la forme de réseaux de neurones artificiels. Si on s´interese à des populations de tels êtres et à leur évolution ontogénétique et phylogénétique (dont l´implémentation informatique fait appel aux algorithmes génétiques) on parlera alors de vie artificielle.=>
L´interactivité intelligente
Avec Edmond Couchot et Marie-Hélène Tramus nous distinguons plusieurs types dinteractivité: La « première interactivité », ou interactivité de commande, qui est celle de la simple boucle rétroactive de la cybernétique et qui est à la base de la plupart des systèmes interactifs. Puis la « seconde interactivité » (par analogie avec la seconde cybernétique) qui apparaît dès lors que le système qui la produit est capable de se modifier lui-même au cours dun apprentissage par lequel il interagit avec son environnement afin de sy adapter. Il sagit bien là dun comportement que lon pourrait qualifier d « intelligent » et qui traduit le concept dautopoiése introduit par Francisco Varela.Pour mettre en œuvre ce concept il faut construire un système interactif intelligent, autonome et possiblement émotionnel (susceptible d´éprouver des émotions et non pas seulement de les montrer ...), on est là très loin de la simple animation, triviale, d´un personnage et on entre dans un nouveau domaine aux frontières de l´art, des neurosciences et de l´informatique.
=>
Conclusion
On aura compris que le seul contrôle est inopérant et appauvrissant alors que de l´autonomie peuvent émerger des solutions insoupçonnées, nouvelles et de portée esthétique. Ce texte avait pour but de montrer qu´il existe des techniques informatiques permettant de faire le lien entre une imagination (intuitive, irrationnelle) et des systèmes (logiques, matériels) capables de les exprimer.<=
Bibliographie
BERTHOZ Alain Le sens du mouvement, Odile Jacob 1997.BERTHOZ Alain La décision, Odile Jacob 2003.
CHAZAL Gérard Les réseaux du sens: de l´informatique aux neurosciences, Champ Vallon 2000.
COUCHOT Edmond La nature de l´art, HERMANN 2012.
BRET Michel "Une méthode comportementale de modélisation et d´animation du corps humain", refusé par IMAGINA en 1998.
BRET Michel, TRAMUS Marie-Hélène, BERTHOZ Alain "Interacting with an intelligent dancing figure : artistic experiments at the crossroads between art and cognitive science" in Leonardo Volume 38, Number 1, pp 47-54, 2005.
BRET Michel "Émergence et résonance neuronale", in Journée Art/technologie de l´information et de la communication, Universalité Le Mirail Toulouse, 15 décembre 2006 .
BRET Michel "Émotion artificielle", ITAU Cultural, Saopaulo, Brésil, juillet 2006.
CARDON Alain conscience artificielle et systèmes adaptatifs, Eyrolles 2000.
CARDON Alain modeliser et concevoir une machine pensante, VUIBERT 2004.
DAMASIO A. R. Lerreur de Descartes, Ed Odile Jacob 1995.
DAMASIO A. R. Le sentiment même de soi, Ed Odile Jacob 1999.
EDELMAN Gerald M. Neural Darwinism : The Theory of Neural Group Selection, Basic Book, New York 1987.
EDELMAN Gerald M. Comment la matière devient conscience, Ed Odile Jacob 2000.
HEUDIN Jean-Claude La Vie Artificielle, HERMES 1994.
McCULLOCH, PITTS W.H "A logical calculus of the ideas immanent in nervous activity", Bulletin of Mathematical Biophysics, 5: 115-138, 1943.
MEYER Jean_Arcady "Les animaux artificiels sont-ils pour demain ?", in LA RECHERCHE, 313 46-50, octobre 1998.
NEUMANN von Johe "Theory of Self-Reproducing Automata", University of Illinois 1966.
RUMELHART 1975.
TRAMUS Marie-Hélène, BRET Michel, COUCHOT Edmond, La seconde interactivité, in Arte e vida no século XXI, Organizadora Diana Domongues, UNESP, Brasil (2003).
TURING A "Computing machinery and intelligence", Mind, pp 433-460, 1950.
VARELA Francisco L´inscription corporelle de l´esprit, Ed du Seuil 1999.
WIENER Norbert Cybernetics or Control and Communication in the animal and the Machine, Cambridge (Mass), 1948.